University of Michigan
IncomingFall 2026 (Incoming)
M.S. Robotics · Rackham Graduate School
Ann Arbor, MI
Mechanical Engineer·Robotics·Autonomous Vehicles
Incoming M.S. Robotics @ University of Michigan·RPI '26
I am a Mechanical Engineering student at Rensselaer Polytechnic Institute and an incoming M.S. in Robotics student at the University of Michigan, with interests in robotics, autonomous vehicles, control systems, and product development.
My background combines hands-on mechanical engineering with programming, prototyping, and system thinking. I enjoy taking projects from concept to implementation through CAD, fabrication, testing, and control development. Through research and engineering projects I have developed experience in Python, ROS, MATLAB, vehicle dynamics, and practical problem-solving in multidisciplinary environments.
I am most motivated by work that brings together mechanics, controls, and intelligent systems to solve real-world problems. I am currently seeking opportunities to continue building my skills in robotics, autonomous systems, and advanced engineering design.
Top Skills
Full toolkit
M.S. Robotics · Rackham Graduate School
B.S. Mechanical Engineering
Honors — Dean's Honor List · 7 semesters (Fall 2022 – Fall 2025)
Activities — Rensselaer Motorsport · Rensselaer Student Auto Shop (RSAS)
High School Diploma
XAL Research Lab · Rensselaer Polytechnic Institute
Contributing to autonomous-vehicle research under Prof. Franck Djeumou, including the Can-Am X3 project presented to Toyota Research Institute.
Tesla
Reverse-engineered the Tesla Model 3 battery pack coolant distribution manifold and produced CAD redesigns, plus an integrated mounting bracket for autonomous driving sensors.
Rensselaer Student Auto Shop (RSAS)
Manage weekly operations of a student-run auto shop and provide hands-on support for student vehicle work.
Rensselaer Motorsport (Formula SAE)
Contributed to design and fabrication of the team’s Formula SAE race car.
A slow camera pass over the work that's currently on the bench — research, hardware, and software in active rotation.

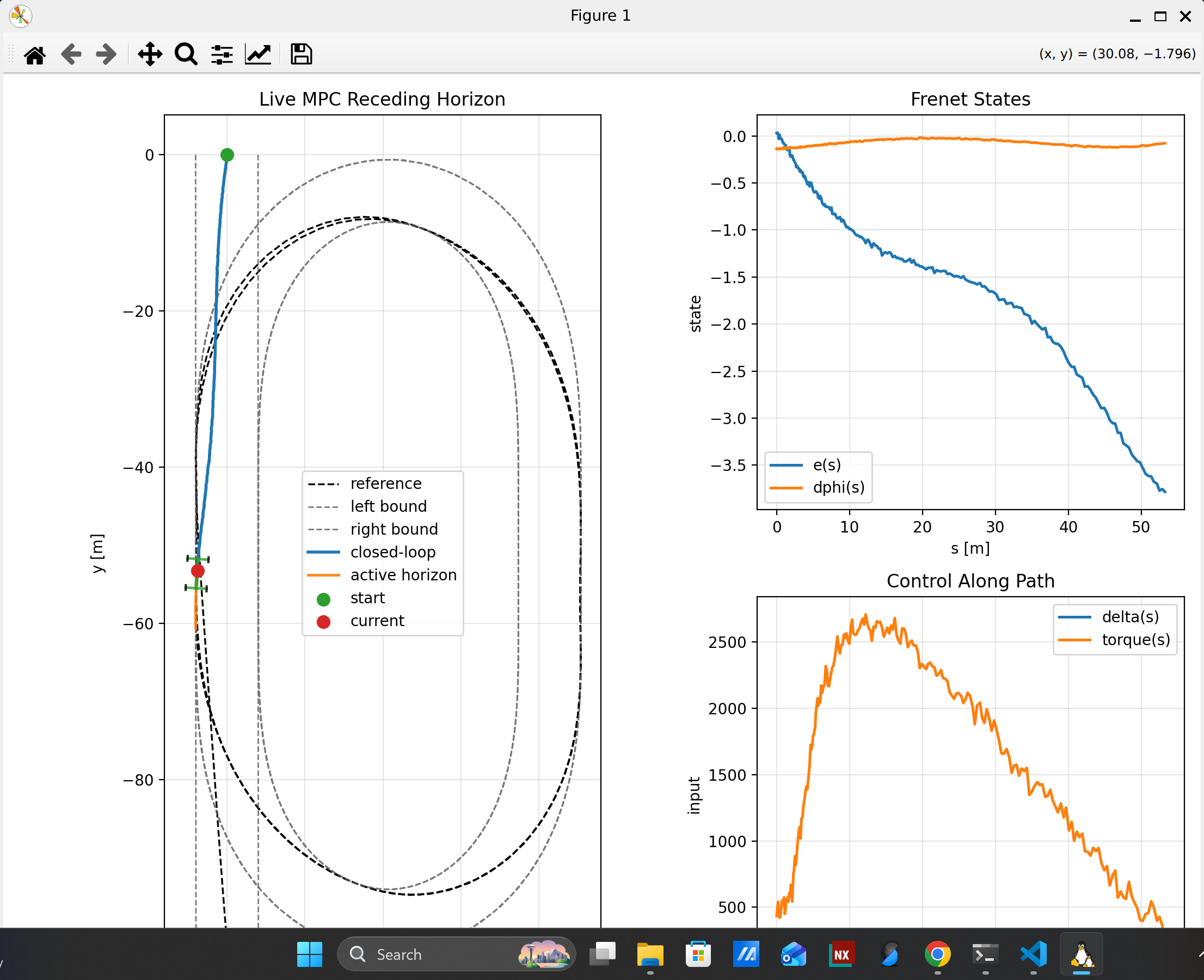
Closed-loop brake automation for autonomous control under slipping conditions. Presented to Toyota Research Institute.

A mix of research, capstone, coursework, and personal builds across robotics, mechanical design, and software.
Closed-loop control, actuation, and embedded sensing.


Brake-automation design for a Can-Am X3 supporting automated vehicle control and testing. Handles system design, actuation concepts, and practical integration for closed-loop control under slipping conditions.


Encoder-based wheel speed sensing system with embedded hardware integration for vehicle data acquisition. Ties into the broader autonomous stack on the Can-Am X3 platform.

Designed a cycloidal drive gearbox for compact high-reduction actuation in robotics applications. Full CAD, tolerance analysis, and prototype validation.

Designed and built a 4-DOF robotic arm with focus on mechanical structure, motion, and actuator integration. Planned AI-powered camera for object detection and pick-and-place; integrated onto the Leaf Vacuum robot platform.
Mechanisms, capstone, and award-winning team builds.
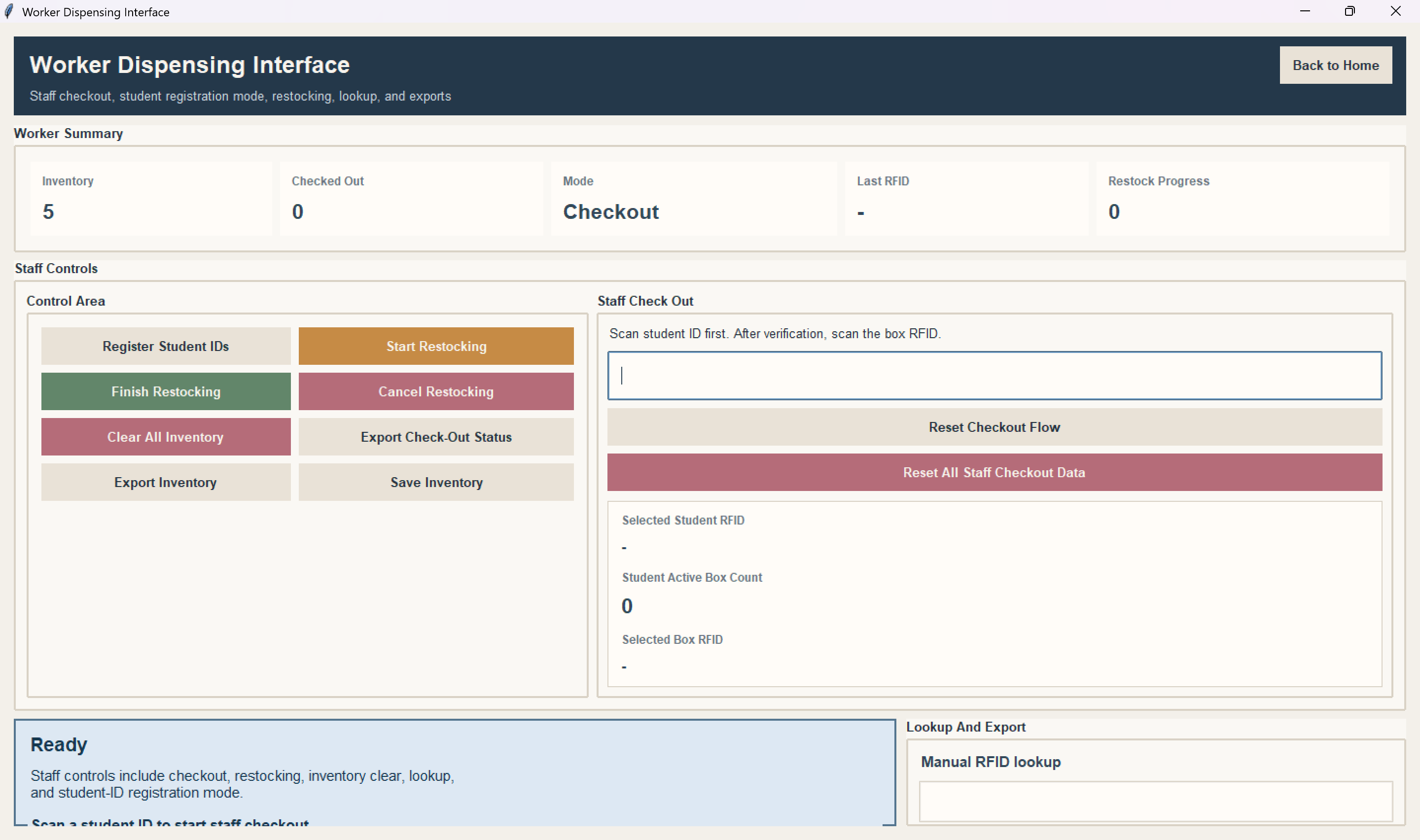
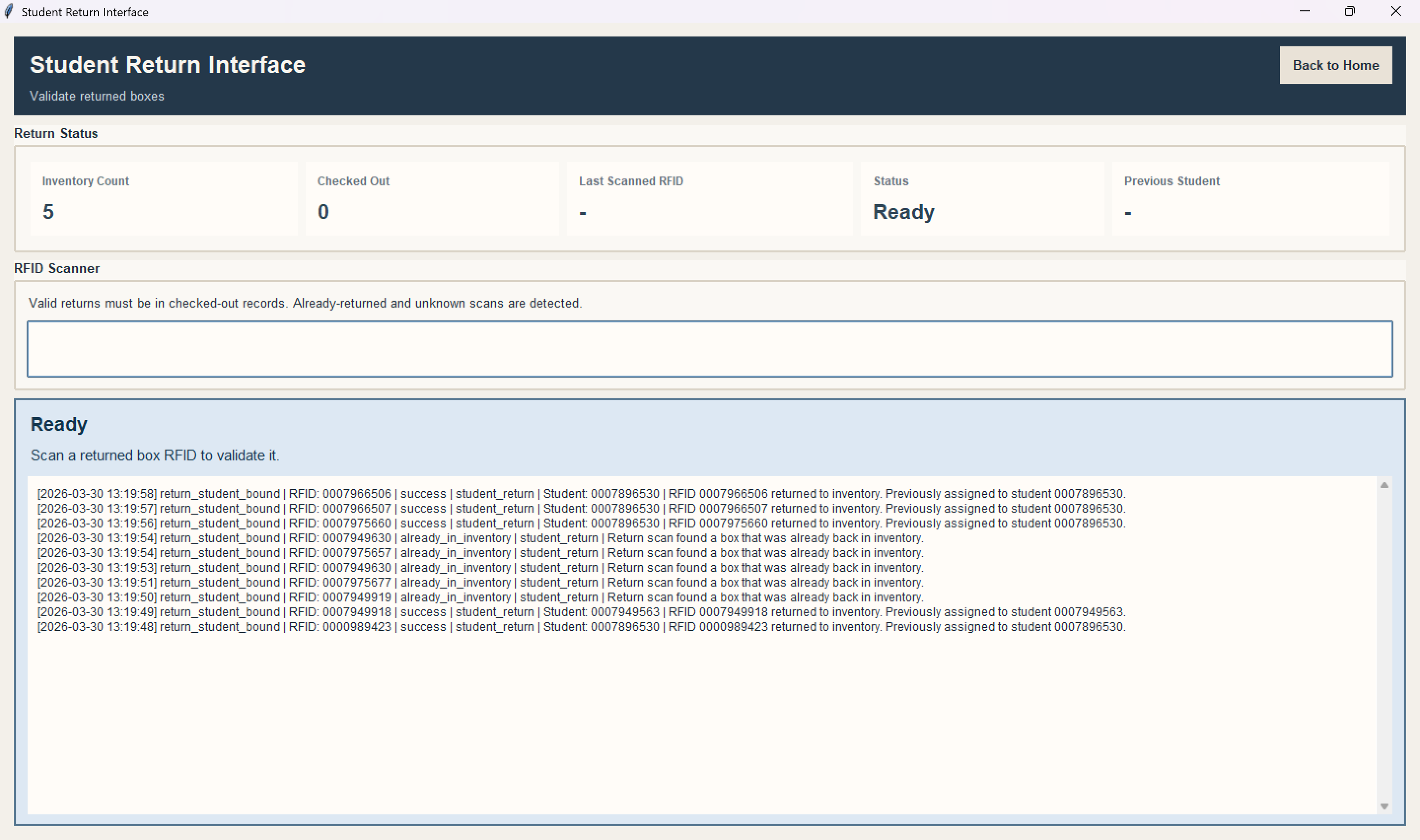
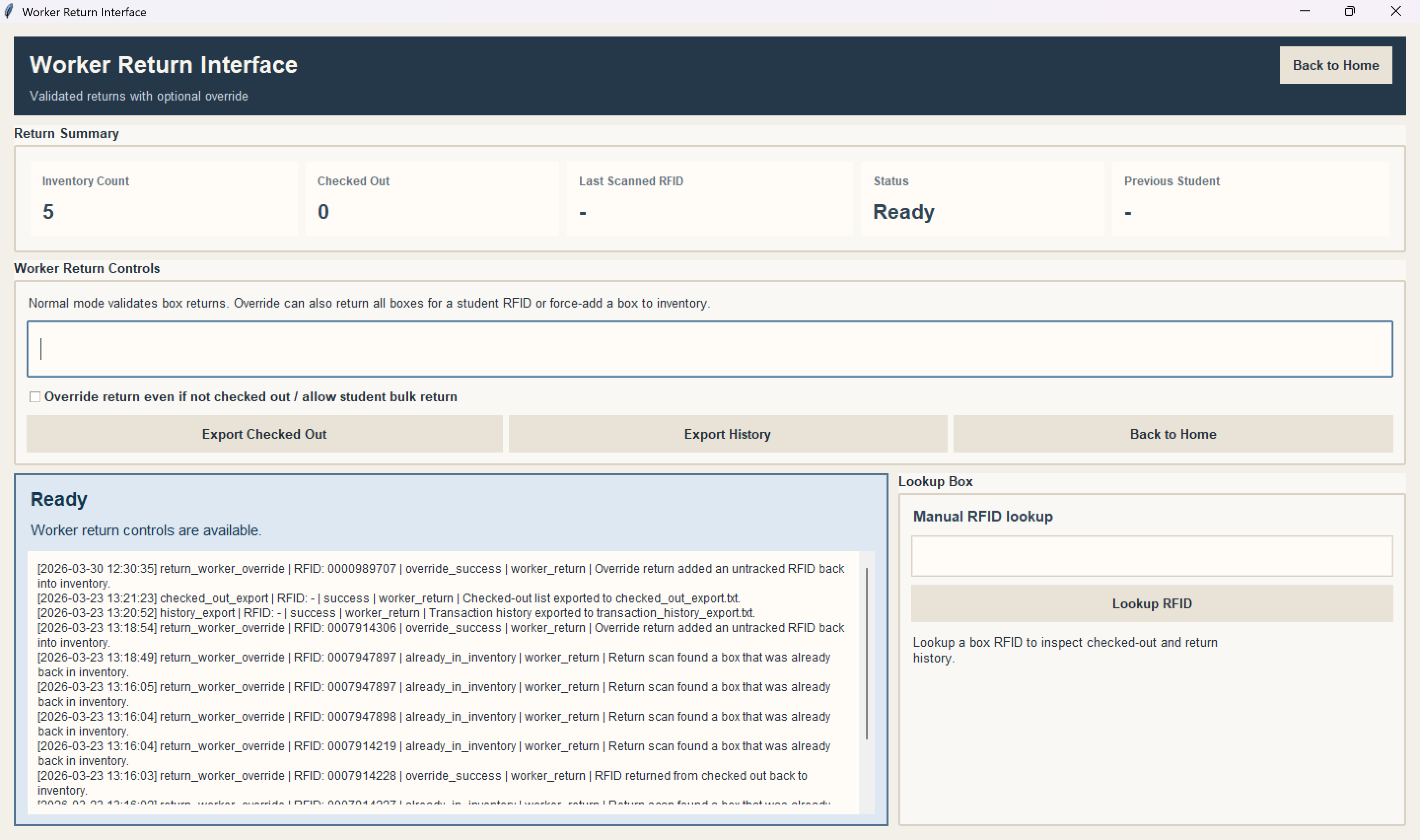
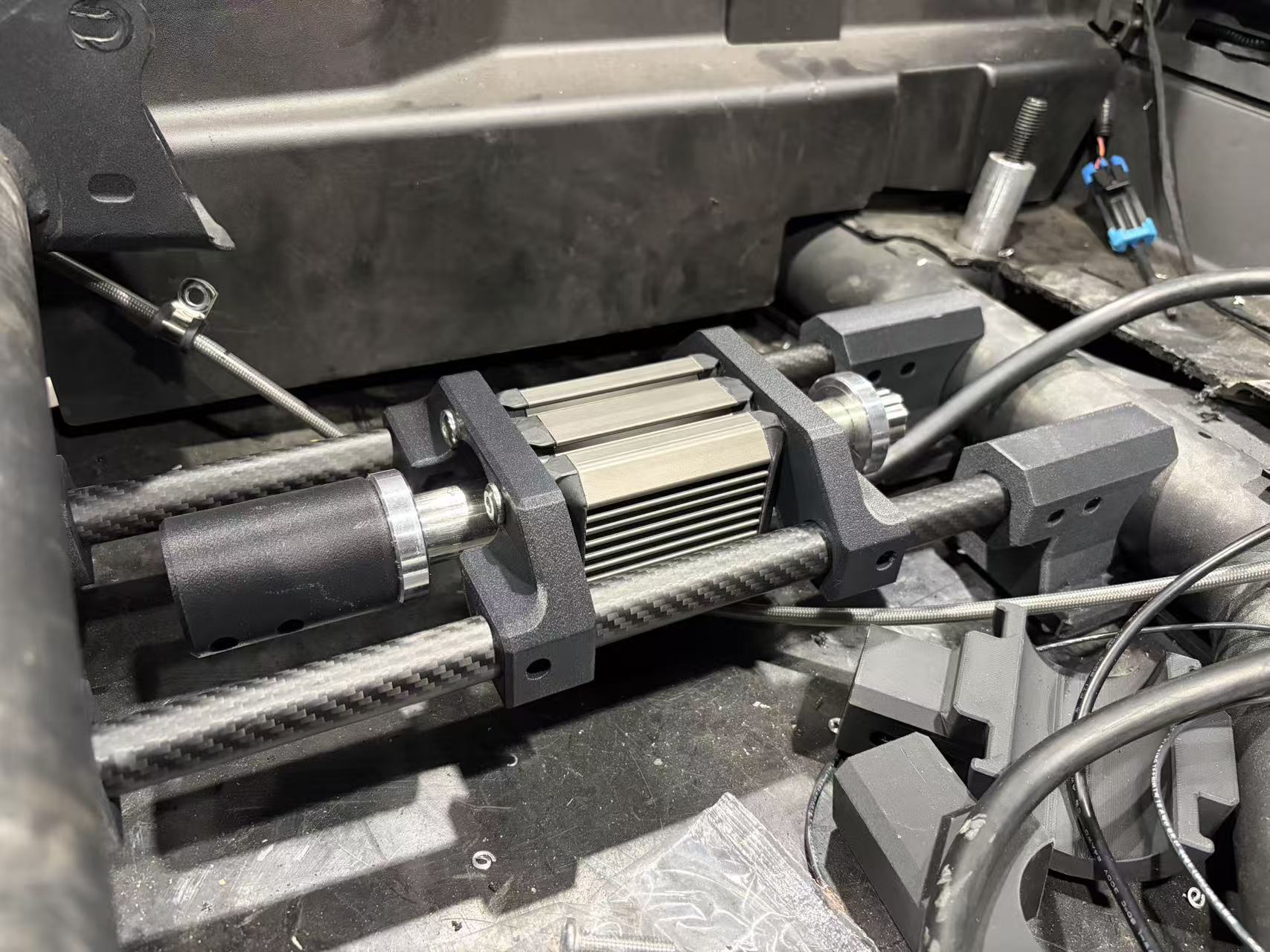
Senior capstone: a fully automated vertical magazine dispenser with escapement/indexer, lead screw lift, and NEMA 23 stepper actuation. End-to-end design, fabrication, and control.
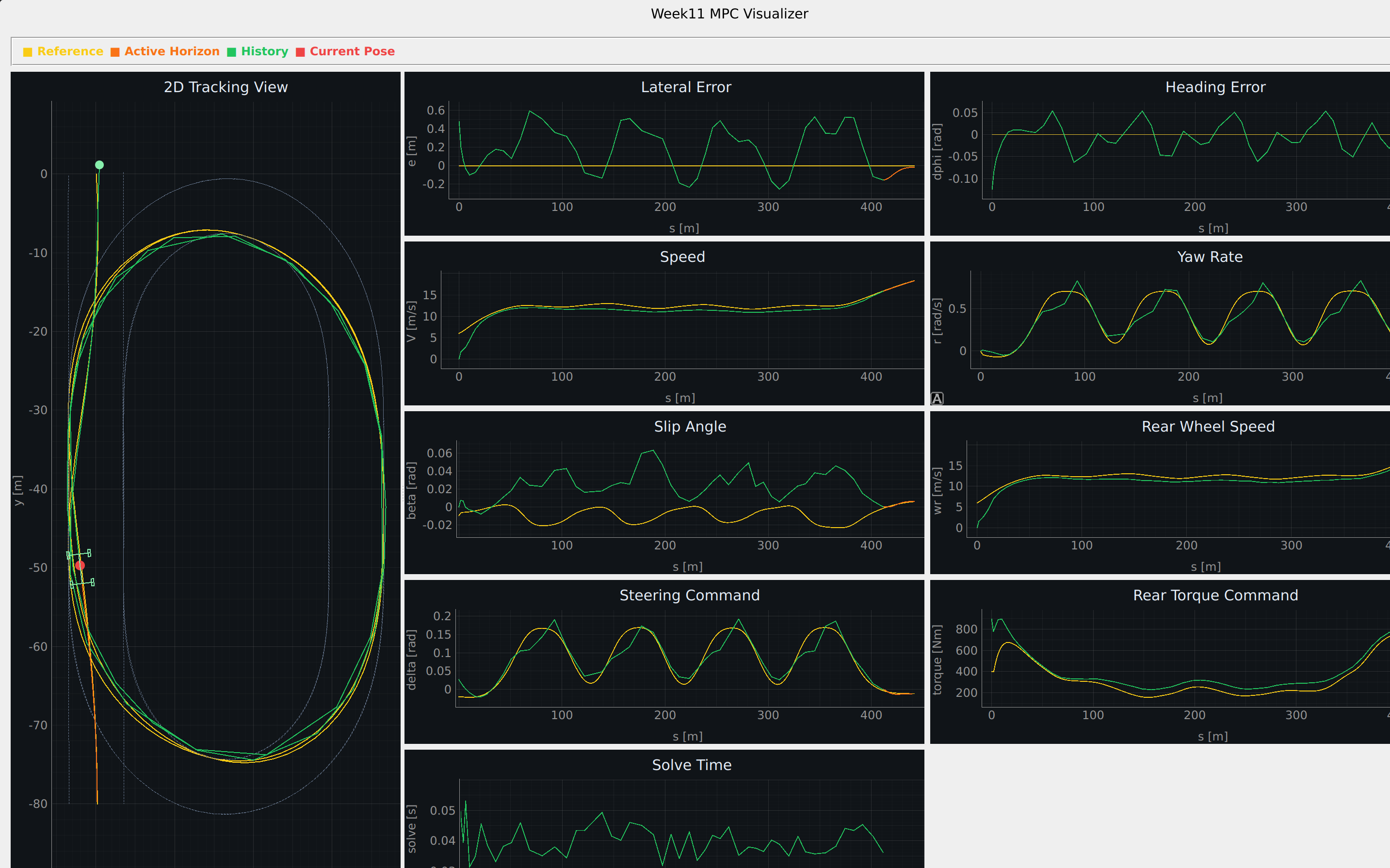
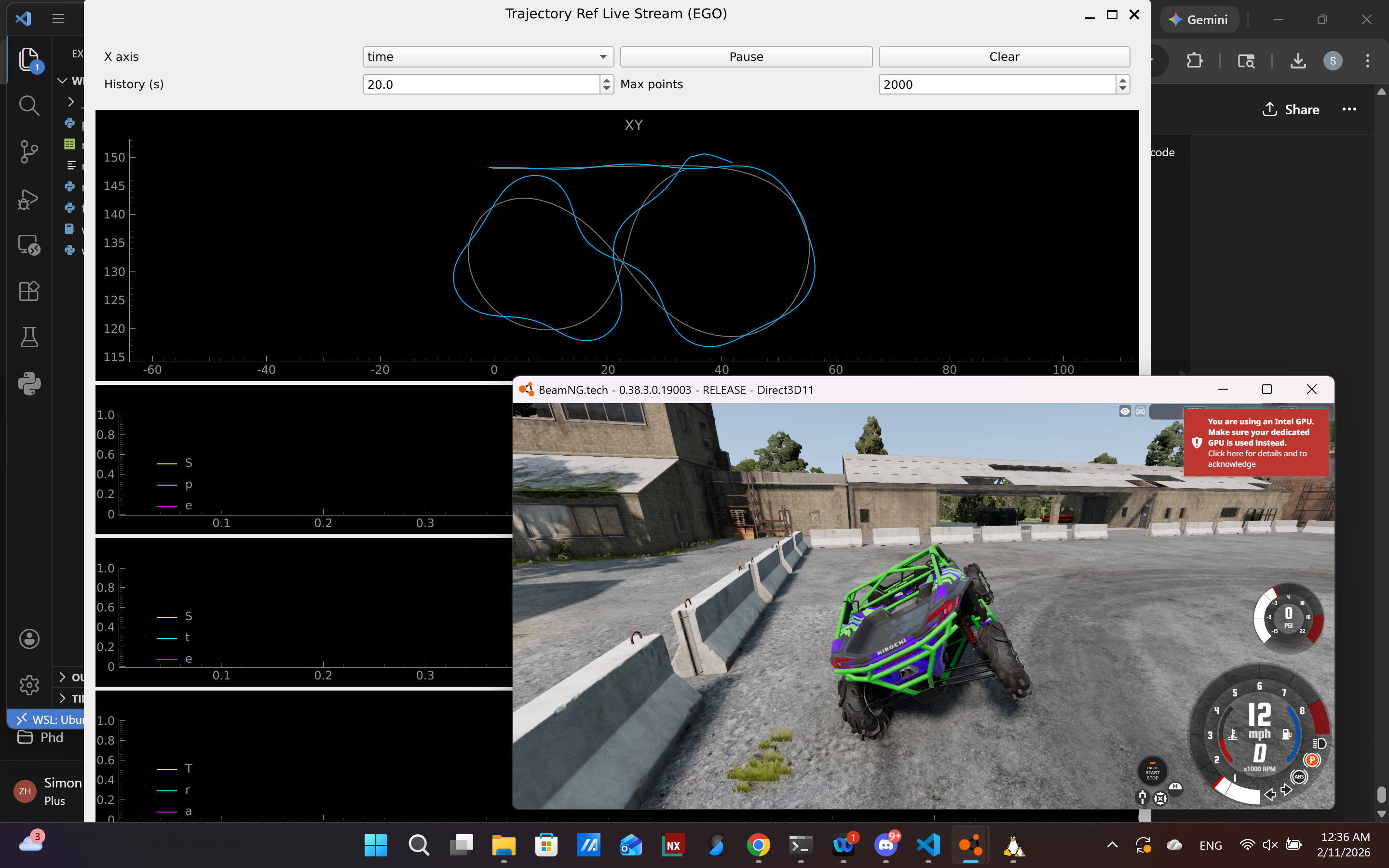
Implemented feedforward + PI speed controllers for a vehicle in BeamNG.tech using ROS 2. Used PlotJuggler for log analysis and controller tuning.
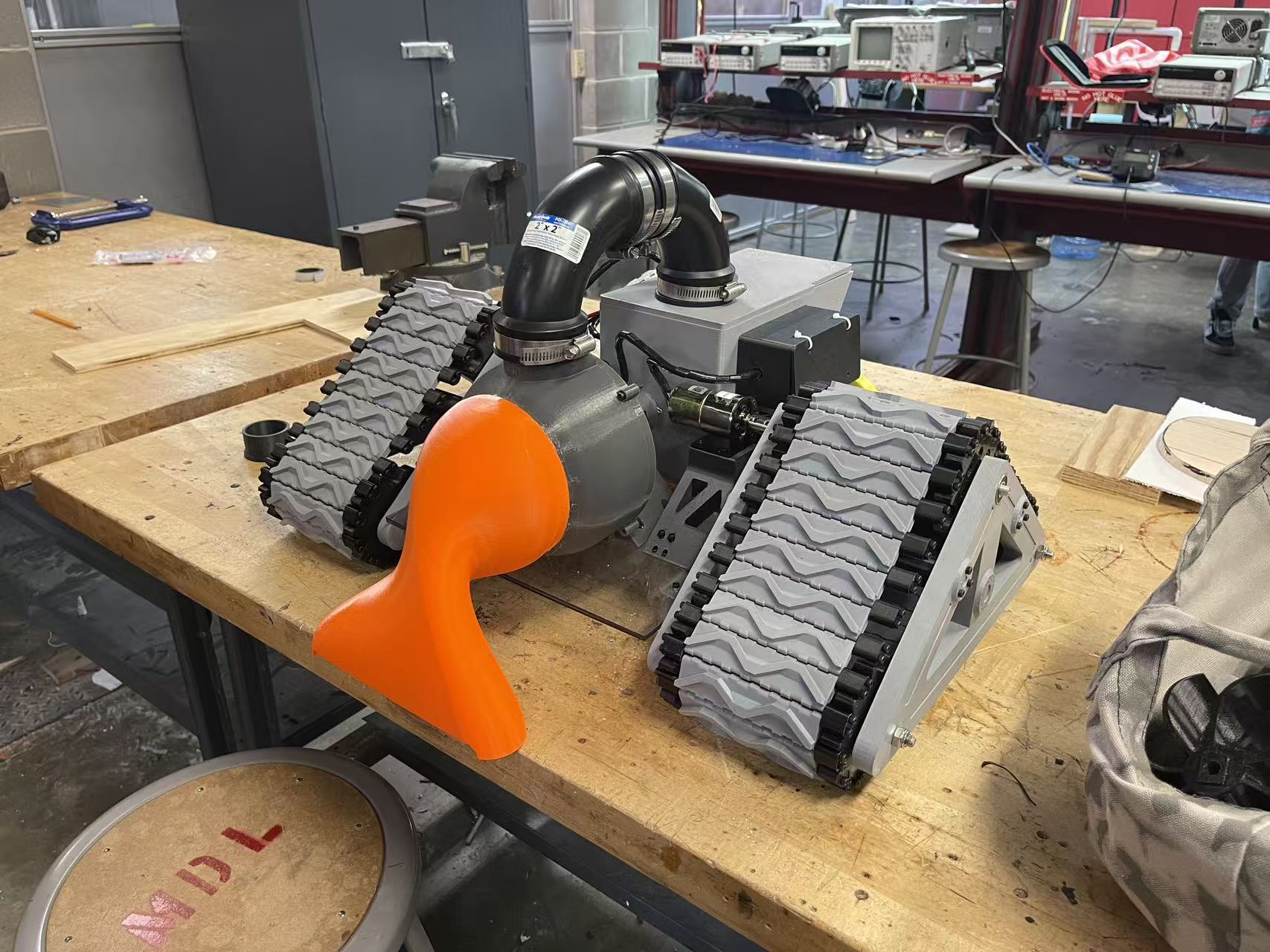
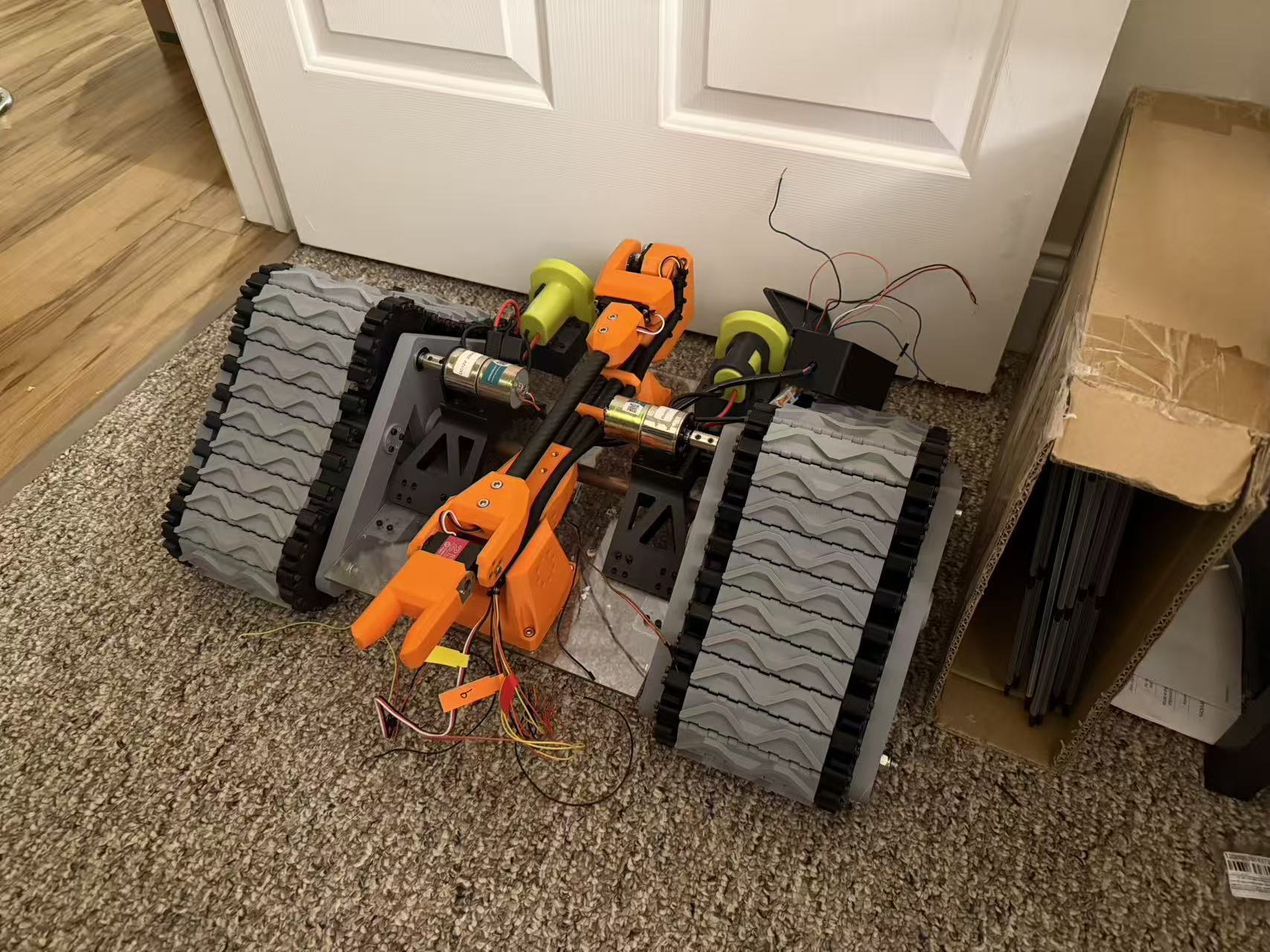
Award-winning 3D-printed yard-cleaning robot with tracked chassis, two motors, and vacuum system controlled by Arduino. Recognized as Best IED Project at RPI — recognized two years running.
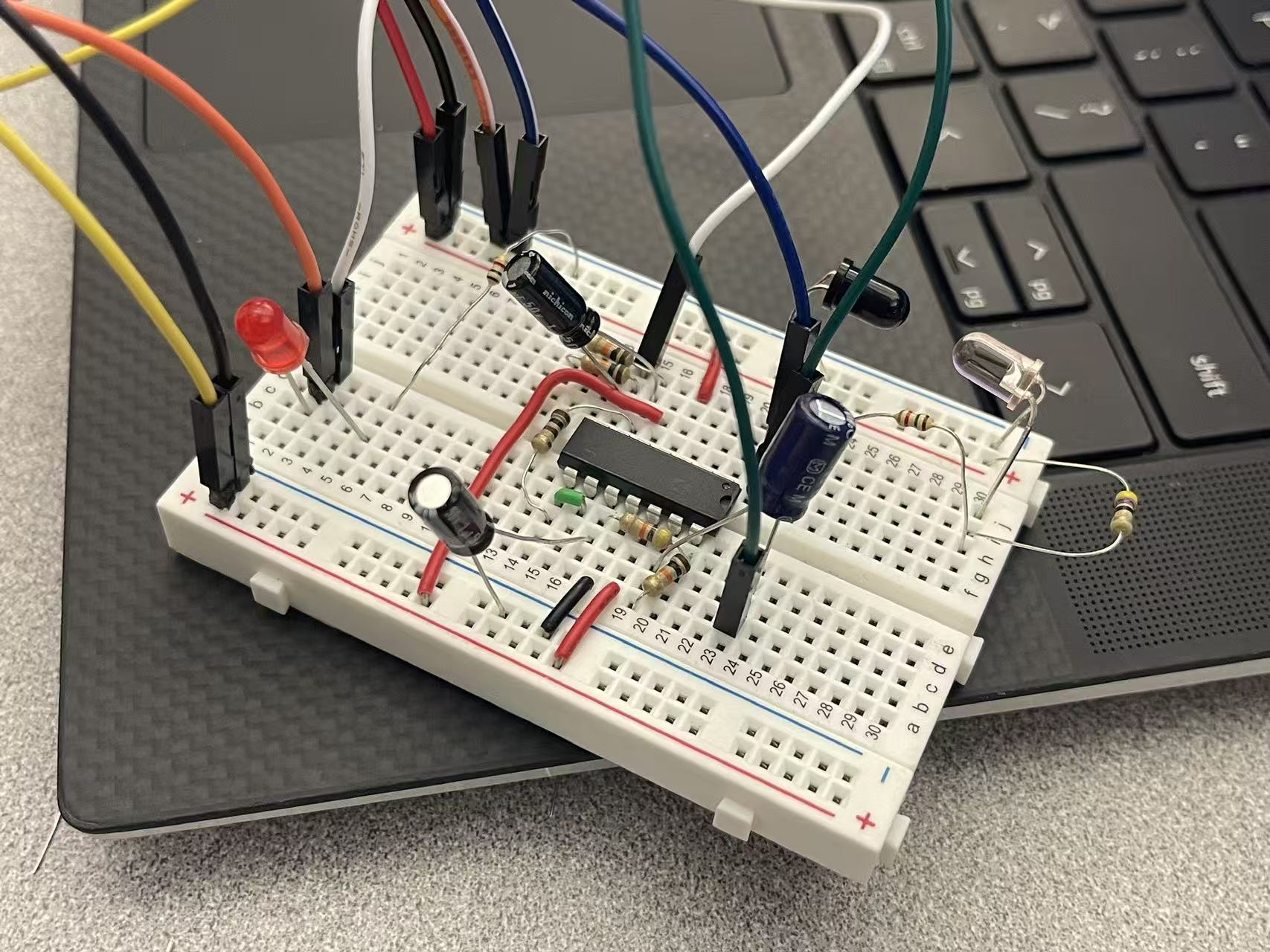
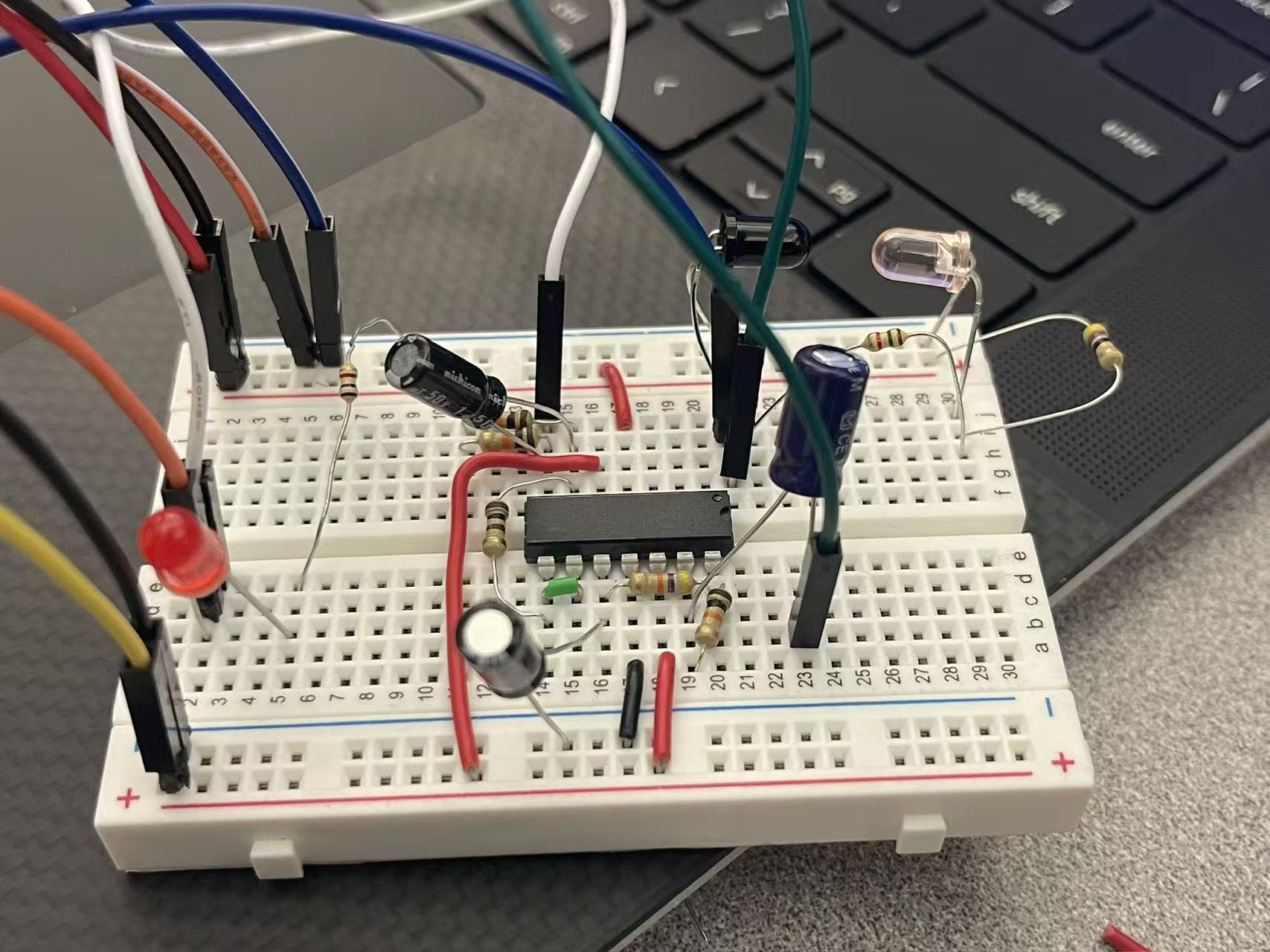
Analog circuit with amplifiers and filters to detect heartbeats in the 60–180 bpm range. Signal conditioning and noise rejection from first principles.
Hardware-adjacent code and personal fabrication.
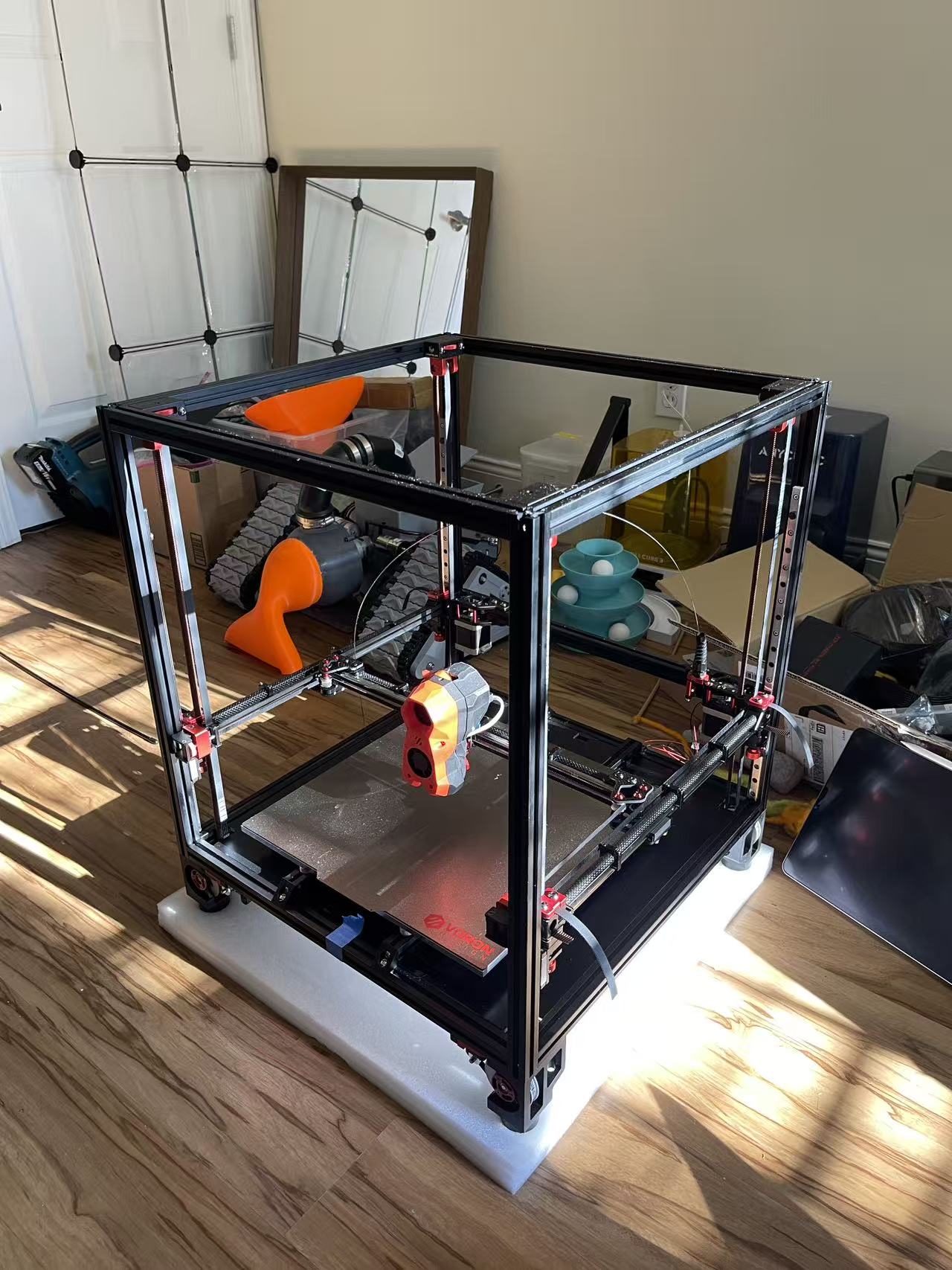
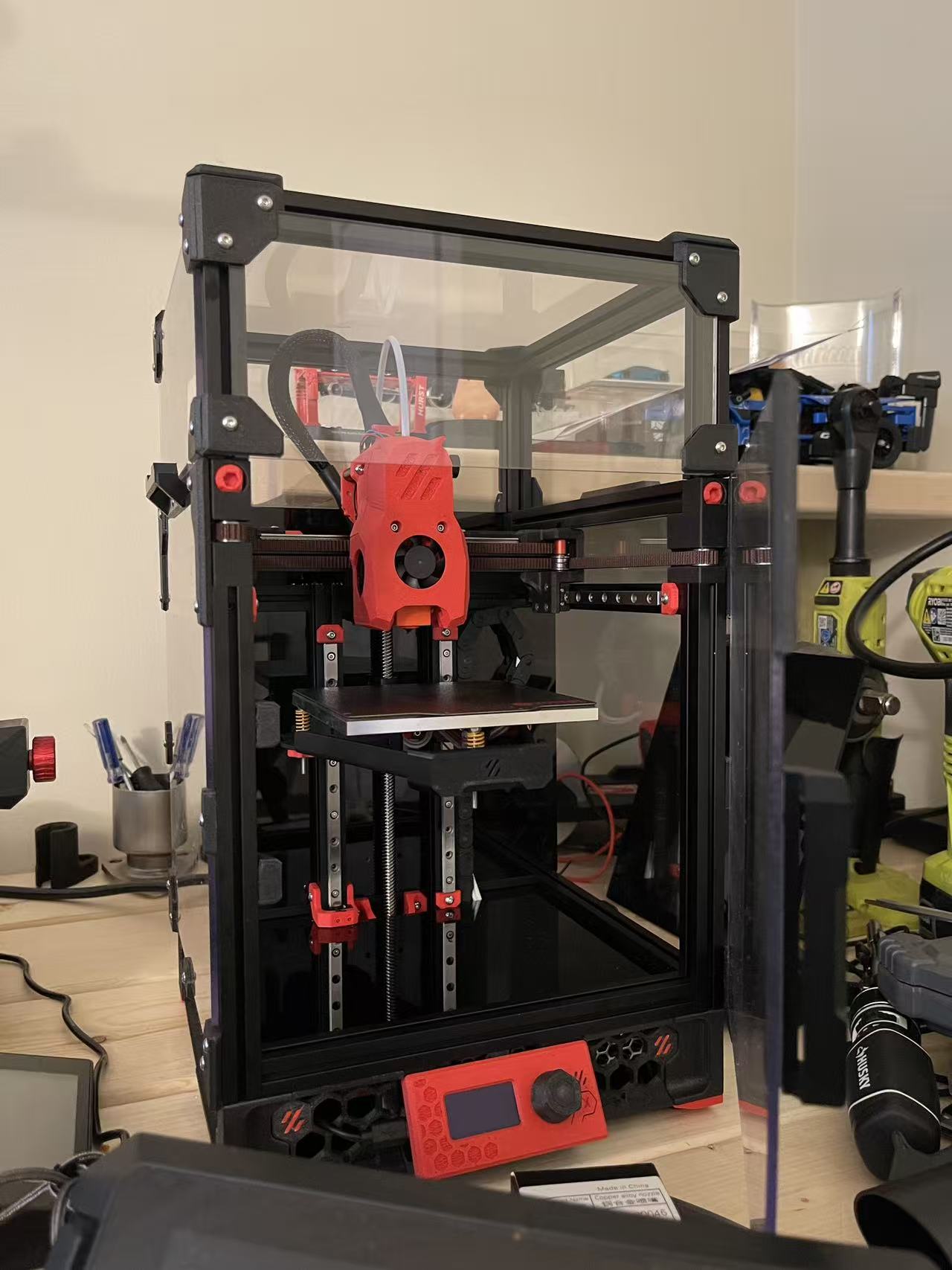
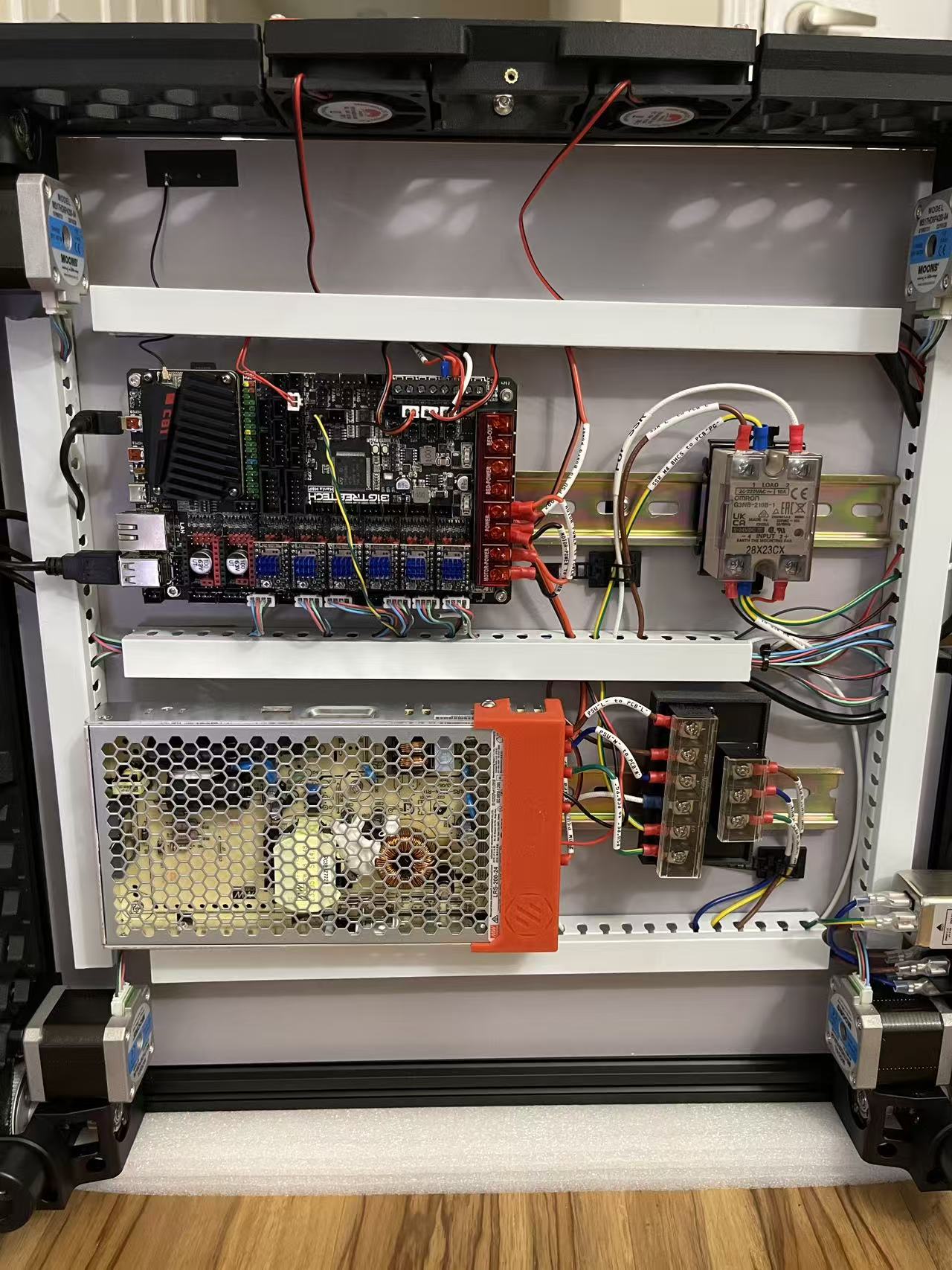
Self-assembled two Vorons from scratch for high-speed, high-quality printing. Customized G-code, upgraded a Voron 2.4 with a carbon fiber gantry and metal components, and designed custom camera and LED mounts in CAD.
Personal builds and daily drivers. Wrenching on cars is how I got into mechanical engineering in the first place.

Current build
Coilovers, suspension work, staged upgrades. Project car.


2023 – current
Full overhaul: disassembly, cleaning, chassis repair, preparing for new paint.



2023
Restoration focused on mechanical repairs and aesthetic improvements.


2022 – 2024
Performance and aesthetic modifications.

2020 – 2023
Performance and handling upgrades.
Open to Summer 2026 internship conversations, research chats, and anything else at the intersection of mechanics, controls, and intelligent systems.